








Walk-man autót vezet és égő házból ment - ha kész lesz.
A robot szerkezete az emberi anatómiát utánozza, úgy jár, mint egy ember, és a jövőben kockázatos műveleteknél, mondjuk katasztrófák helyszínén helyettesítheti majd az embert.
Ez nem tudományos-fantasztikum: a Walk-Man projektet jelenleg is fejlesztik a genovai Technológiai Intézetben. Jelenleg még szüksége van emberi utasításokra, de a közeljövőben magának kell felmérnie a veszélyt és a környezeti körülményeket, majd el kell végeznie a munkát. A csapat most a robot szoftverén dolgozik, hogy egyenetlen felületen is meg tudja őrizni az egyensúlyát.
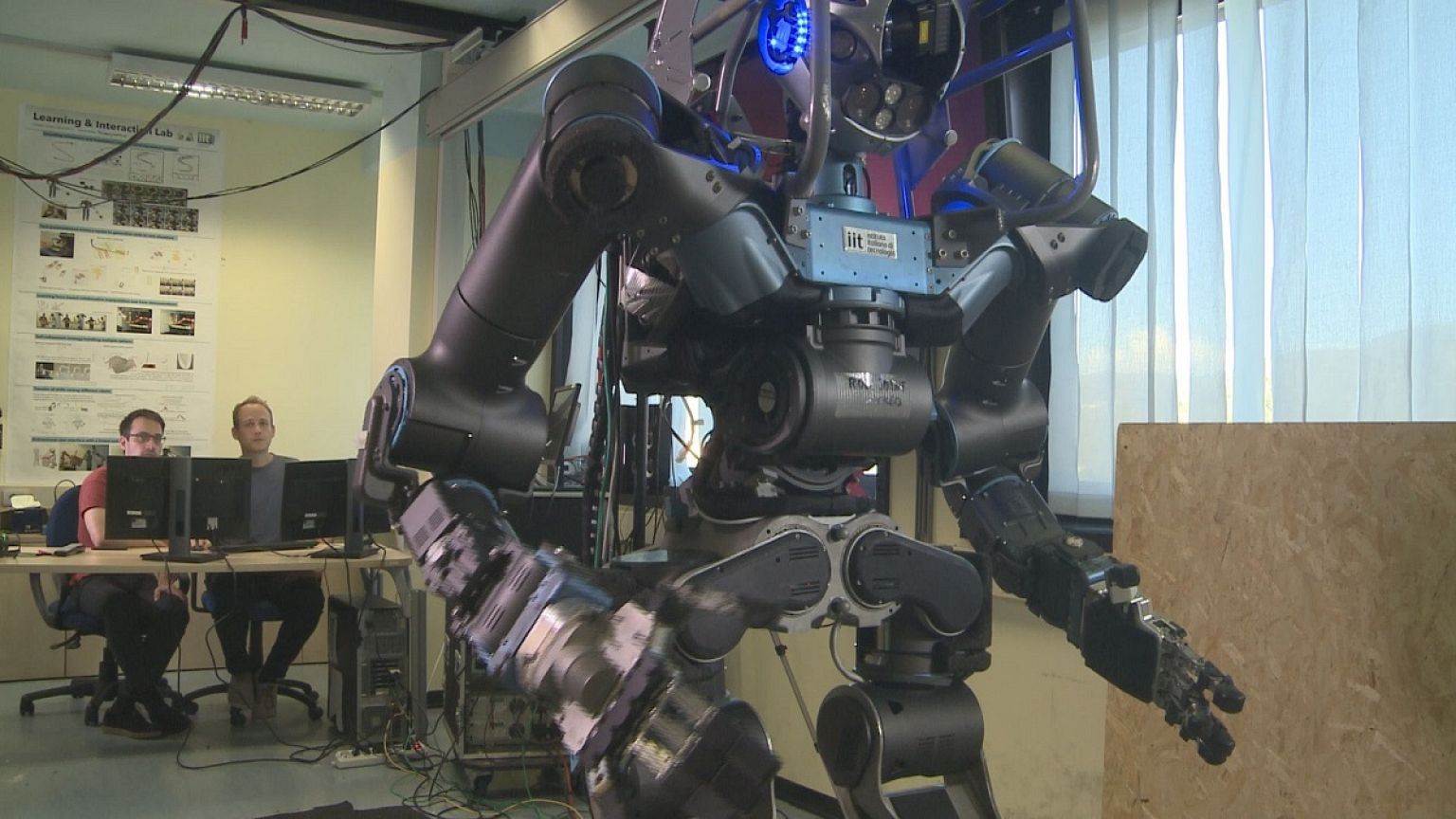
- A robot antropomorf, sokféle ízülete van, sokféle mozgásra képes, gyakorlatilag egyenértékű az emberi testtel. Itt a kéz, az öt ujj, itt a hüvelykujj, és arra terveztük, nagy súlyokat is tudjon mozgatni – mutatta be nekünk a prototípust Nikolaosz Tszagarakisz, a genovai Technológiai Intézet vezető kutatója. – A legtöbb, minket körülvevő tárgyat az emberi anatómia számításba vételével alkották meg, Egy emberi test alapján létrehozott robot ugyanazokat a feladatokat sokkal könnyebben hajtja végre, mint ha másfajta anatómiát vennénk alapul.
A 180 centi magas robot két kamerával és egy forgó 3D szkennerrel érzékeli a környezetét. Ha bonyolultabb problémába ütközik, ember veszi át az irányítást egy távirányító segítségével. A Walk-man már átment egy autóvezetési teszten, és bonyolult, emberszerű mozgásra is képes. Technikai értelemben a kutatók előtt álló legnagyobb kihívás az volt, hogyan mozogjon, tartson egyensúlyt és mozgasson tárgyakat.
- Pozíciós érzékelőik vannak az ízületekben, innen tudja, éppen milyen helyzetben vannak a tagjai – magyarázta a robot működését Joannisz Szarakoglu, a Technológiai Intézet mérnöke. – Szükség van a forgatónyomaték mérésére is azért, hogy tudja, milyen külső erők hatnak rá éppen. Ez a robot a testi erejét tekintve nagyon hasonló egy középkategóriás autóhoz. A robot minden ízülete, mondjuk térdízület vagy a csípőízület, amelynek nagy erőfeszítéseket kell tennie, nagyjából egy 50 köbcentis robogómotor erejét kell kifejtenie.
Emberek számára tervezett környezetben az emberként viselkedő és mozgó robotok komoly előnyökkel indulnak a kerekeken gördülő konstrukciókhoz képest. Ezért a kutatók elsősorban a természetből nyerték az inspirációt.
- A robot megtervezésekor nagyon sok ihletet nyertünk a biológia bizonyos alapelveiből – magyarázta a projekt másik mérnöke, Jörn Malzahn. – Az egyik az energiatakarékosság visszahajló, visszacsapó konstrukciók alkalmazásával, hogy a természetes mozgás során jelentkező lendületi fázist ki lehessen használni, ezekben a fázisokban nem kell energiát felhasználni ahhoz, hogy mozgassuk a robotot, mert a gravitáció megsegít minket. Ezt a fajta inspirációt minden általunk készített robotnál megpróbáljuk használni a nagyobb energiahatékonyság érdekében, vagyis hogy a robot tovább tudjon egy töltéssel működni.
Walk-man számára a következő fontos lépés 2017-ben következik, amikor az olasz katasztrófavédelem tesztjén kell átmennie: be kell mennie egy égő házba, és onnan megmentenie egy embert.
Produced by Claudio Rosmino